Darlig
Introduction
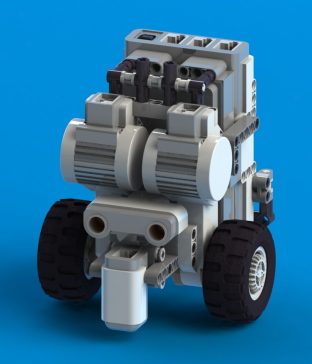
During my time in the MINDSTORMS Developer Program (MDP) I helped beta test the LEGO MINDSTORMS NXT kit and software; while a large amount of my time was spend coding software and designing sensors, I needed a robot that could be used as an experimental analog, this robot became known as "Darlig".
Darlig was developed in early 2006, before most even had access to the kits, the idea was to have a small/compact platform with a low center of gravity and minimal turning radius. This was achieved by keeping the NXT brick vertical and keeping the motors as close as possible, at first the design had two swivel wheels (front & back), however the idea struck me that a forward facing ultrasonic and a downward facing light sensor could be kept attached as they are the most useful sensors for my work with RoboRAVE International. These sensors replaced the front swivel wheel by residing in the gap between the motors, from that point on Darlig remained in that configuration during the rest of my experimentation with the system. The only time the design changed was to incorporate the Li-Ion rechargeable battery but not much changed, however since the robot is modular; there are plenty of places to attached components to.
Line Following
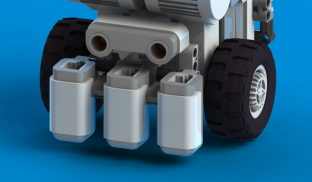
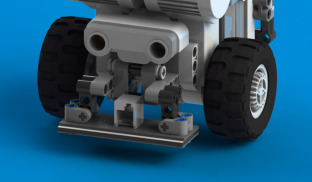
Darlig is the ideal robot for line following, I've always been a big advocate of using only one light sensor this is primarily because I grew up with only one light sensor for the old Mindstorms Robotics Invention System 1.0 and never found a need for more, while most would say this produces a rather slow line following robot I've found the use of fuzzy logic programming to be quite useful. However this robot can easily be adjusted to accommodate up to three the light sensors along the front just by replacing the connecting rods on the first one. Back in early 2009, Mindsensors contacted me about testing their NXTLineLeader sensor, this sensor happened to fit perfectly with Darlig, while I believe the amount of holes on the sensor has changed from the prototype unit, this type of attachment should still work.
Fire Fighting
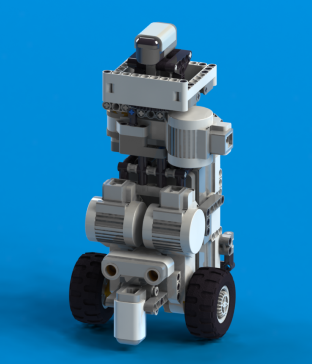
Darlig was later equipped with a rotatable head, this proved useful for a fire seeking robot; while the head looks for fire, the body can move around and detect obstacles. The original sensor that was incorporated was the Hamamatsu UVTRON, while this allowed Darlig the ability to find fire through the means of UV light, its accuracy was not that great, a large amount of my reports deal with the issues I've had with the UVTRON so I won't mention them on this page. So the search for an alternative began; when HiTechnic released their IRSeeker sensor, RoboRAVE International sent me one and asked if I could become familiar with it to help teach their Fire Fighting workshops, since the workshops for Fire Fighting are done at New Mexico Tech, I gladly agreed and it wasn't long before I had Darlig up and running with the new sensor. You may have noticed a glimpse of Darlig being used in the Fire Fighting Robot in the Reports Section; this shows some of its many attachments and also includes a fan mechanism that has been developed; this fan is a homemade component that will be discussed at a later time.
Current Development
Since fall of 2006, Darlig has made an appearance at RoboRAVE International and has become well known and enjoyed by all. Darlig has been given multiple tasks throughout the years at the RAVE; some involve interactive skits with the founders, often portraying a cute robot that never does as it's told; hence the name "Darlig", which means "Bad" in Norwegian. Some volunteers at RoboRAVE are given the task of being Track Monitors, where they give points to teams based on what their robot accomplishes; Darlig helps demonstrate and clarify what the Track Monitors should and should not give points for. Darlig also works as a "house robot" for the Adventure Challenge, those familiar with the TV series Robot Wars know that "house robots" patrol the area preventing other robots from completing their task. Since Darlig is able to accomplish both challenges at the RoboRAVE, it is often used in the workshops and similar events to show how a challenge should be done, and to promote the RAVE for future competitors.
While the development of Darlig mostly involves different attachments, the current work that is being done involves an interactive instruction manual to allow those interested in Darlig to build one of their own. Issues have arisen due to different kits having different parts but we have been successful in modifying Darlig for those that own an Educational set (#9797). We do believe that Darlig can be made out of any of the MINDSTORMS NXT sets with just a few additional parts.








{kind=link}